
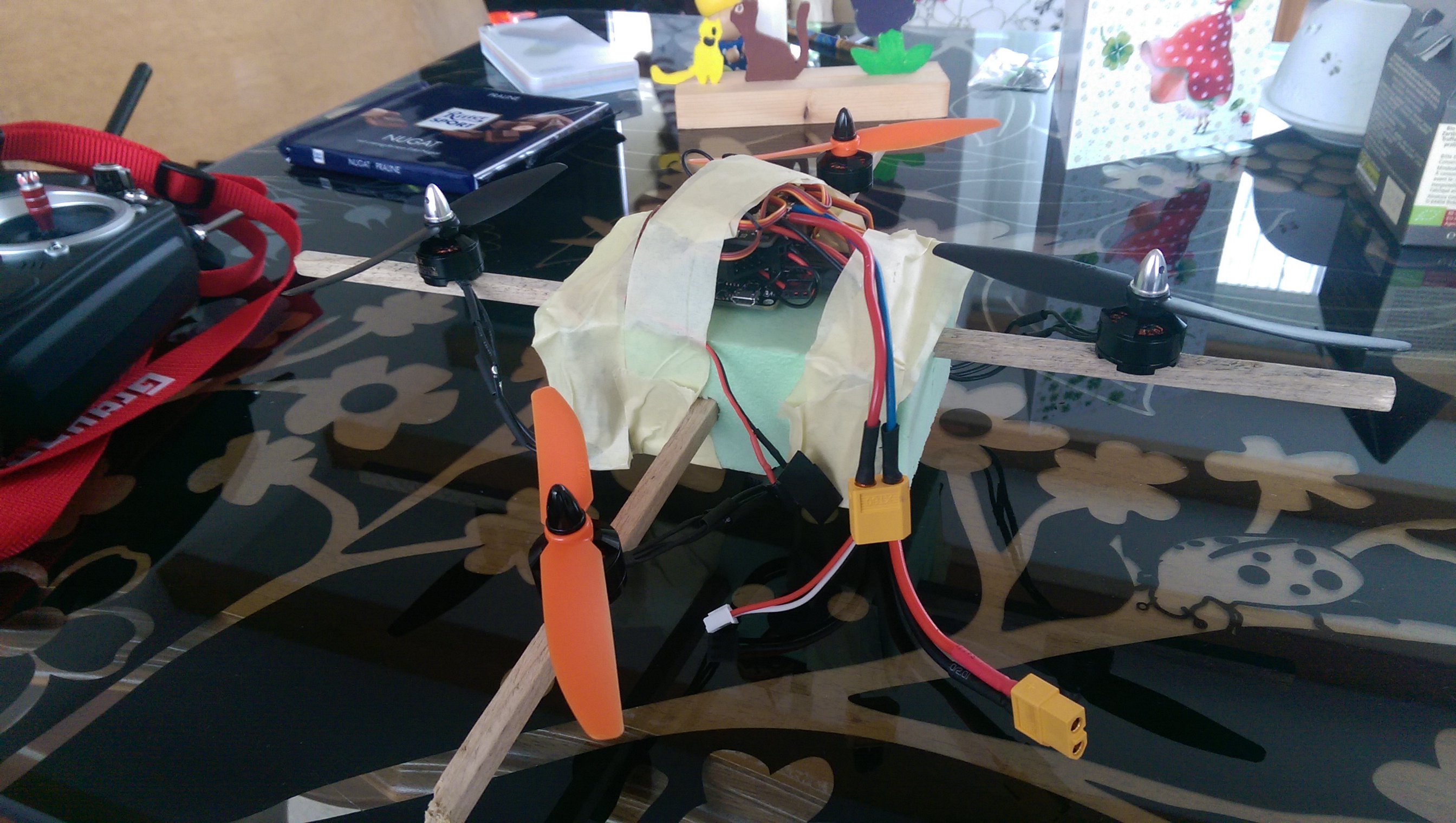
Verbaut sind ein Naze32 Controller, die vier Fahrtenregler, vier Brushless Motoren ein 2S 1300mAh Lipo Pack und eine Stromverteilerplatine. RX-12 von Graupner mit einem GRP-12l. Der Rest ist Styrodour vom Haus und zwei Raketenstöcke mit viel Maler Krepp.
Mittlerweile ist die Telemetrie zwischen der Fernbedienung und dem Fluggerät hergestellt. GPS scheint mit der aktuellen Software nicht zu gehen. Um die Ausrichtung bei größeren Entfernungen einfacher zu machen habe ich zwei kleine Diodenlaser am Modell angebracht, so dass ein heller roter Punkt zu sehen ist wenn das Modell auf einen zufliegt.
Mein Vorgehen war wie Folgt:
Anschluss Empfänger:
Ich benutze den GR12l. Um möglichst wenige Kabel zu benötigen, habe ich auf Kanal 6 die SUM-D Funktion eingestellt und auf Kanal 5 die Telemetrie eingeschaltet. Der Kanal 6 wird einfach mit allen Kabeln direkt verbunden und dient gleichzeitig als Versorgung des Empfängers.
Die Telemetrie wird wie folgt verschaltet:
Cleanflight frontend
Folgende Einstellungen sind Nötig.
Kanalbelegung, Serielle Schnittstelle,
Einstellungen am Sender:
SUMD, Telemetrie, Proportional einstellungen
Der Empfänger muss eingeschaltet sein. Als erstes SUM-D und Telemetrie aktivieren. Dazu auf TLM(rechte Seite linke Teste) drücken.


Dann den Stellbereich der Kanäle anpassen.


Anschluss Verteilerboard:
Hier werden zunächst ein Ackustecker an + und - angeschlossen. Anschließend geht es an die Spannungsversorgung der n Motor Kontroller. Außerdem kann man ein Jumperkabel an die Kontakt anschließen und nachher an die Spannungsmessbuchse des NAZE32 anschließen. UNBEDINGT AUF DIE RICHTIGE POLUNG ACHTEN!!!
Anschluss der Regler an die Motoren:
Bei den Brushless Motoren ist zunächst die Polung nicht wichtig. Einfach die drei Drähte der Motoren mit den drei Drähten des Fahrtenreglers verbinden. Dann werden die vier Motoren an den NAZE32 angeschlossen. hierbei muss von drei der vier Regler das Plus Kabel aus dem Servostecker entfernt werden, da es sonst bei der Empfängerversorgung zu problemen kommen kann, da sich die Spannungslagen geringfügig unterscheiden. Dann zunächst die Motoren OHNE Rotoren ausprobieren ob die Drehrichtung richtig ist. Hierzu einfach mal einen Acku anschließen. und gas geben. Wenn die Drehrichtung nicht stimmt einfach zwei beliebige Kabel zwischen Regler und Motor tauschen.
Erste Fehler:
Motoren drehen falsch rum --> Modell hebt nicht ab
Falscher Motor dreht richtig rum --> Schrauben fallen nach kurzer Zeit ab --> Motoren langsam drehen lassen, die Schraube muss sich festziehen.
Telemetrie geht nicht --> Zu lange mit dem einschalten des Empfängers gewartet, falsch angeschlossen
Teile:
https://www.amazon.de/gp/product/B00XDT2XXC/ref=oh_aui_detailpage_o01_s00?ie=UTF8&psc=1
https://www.amazon.de/gp/product/B013QPEZ42/ref=oh_aui_detailpage_o06_s00?ie=UTF8&psc=1
https://www.graupner.de/fernsteuerung-mz-12-hott-de-6-kanal/s1002.77.de/